����
���̎����x����܇�ϸ��MCU�r(sh��)��Ҫ֪��ʲô
||
�����S��ƽ���µ�܇�v����50��100��(g��)��������ӿ��Ɔ�Ԫ(ECU)-��Ҫ���_(d��)һӢ���늾��B������?c��)ڎׂ�(g��)��ͬ�ľW(w��ng)�j(lu��)���y�ְ댧(d��o)�w��˾�������ҵĵط������܇��
����������܇��(y��ng)�õ���܇�ϸ�MCU�D��
�����ڄ�(d��ng)������(d��ng)ϵ�y(t��ng)���ІΪ�(d��)�Ŀ���ϵ�y(t��ng)����ȼ�χ��䡢�c(di��n)������(ji��)������s���Ԅ�(d��ng)׃������܇�d�\�����Є�(d��ng)���D(zhu��n)�����x܇�Ͱ�ȫ���ҵĵױP����ϵ�y(t��ng)�����M(j��n)���{�T�o��ϵ�y(t��ng)(ADAS)�漰�Ă�(g��)��(d��)����MCU���Ъ�(d��)����܇������ϵ�y(t��ng)����ǰ�՟�����ˢ���Դ�T��늄�(d��ng)܇����ůͨ���{(di��o)��
�������˼��g(sh��)��(f��)�s��֮����߀���ڇ�(y��n)�صļ��g(sh��)�ͱO(ji��n)���ϵK���ڰl(f��)��(d��ng)�C(j��)�������{�T�o��������(d��ng)ϵ�O(ji��n)�����˿����m�ȡ���Ϣ�ʘ��ȷ������Ӯa(ch��n)Ʒ�У����S�ચ(d��)������܇���̎��f(xi��)��(hu��)(SAE)��(bi��o)��(zh��n)���κΡ���܇�ϸ�MCU�����C�M��һЩ�ܸߵĘ�(bi��o)��(zh��n)��֮����x����Ҫȡ�Q�ڑ�(y��ng)�ó�����
��������ȵ�����܇�v(li��n)�W(w��ng)
��������Ԋ���^�쵽���]������һ��(g��)�u��һ������܇?y��n)�Ҳ�]��һ��(g��)������MCU����������һ��(g��)�W(w��ng)�j(lu��)����һ��(g��)�W(w��ng)�j(lu��)��һ������ȡ�Q�������Ĺ��ܡ���Ҫ�W(w��ng)�j(lu��)��CAN��LIN��FlexRay��MOST��Ethernet
AVB(�D1)��
��������������W(w��ng)(CAN)��Ŀǰ��Ҫ����܇�W(w��ng)�j(lu��)�ڙC(j��)œ����(d��ng)�����ɣ��ױP��܇��ϵ�y(t��ng)��
��������(d��ng)��ȫ���Կ��ƺ��ײ����_(d��)�������Ը�֪ӭ�������܇�v���l(f��)�����������x܇�������D(zhu��n)����ơ�
������܇�x����푑�(y��ng)��CAN���������_(d��)�ľ��������Ԇ���(d��ng)����(b��o)���oՓ��������(b��o)�����^��������/��̧�^�@ʾ��
����푑�(y��ng)�����_(d��)�ľ������Ƅ�(d��ng)���ƿ��Ԇ���(d��ng)����(qi��ng)�Ƅ�(d��ng)�������@ȡ�Q��܇݆�ٶȺͽӽ���һ�v܇��
����ͬ�r(sh��)����(du��)�ڿ��ܰl(f��)����ײ�ľ��棬�B�ӵ���ȫ����MCU�����A(y��)�����o��ȫ��;�����������ײ����������ü�ޣ��tҪ�pһЩ��
�������_܇�v�W(w��ng)�j(lu��)����
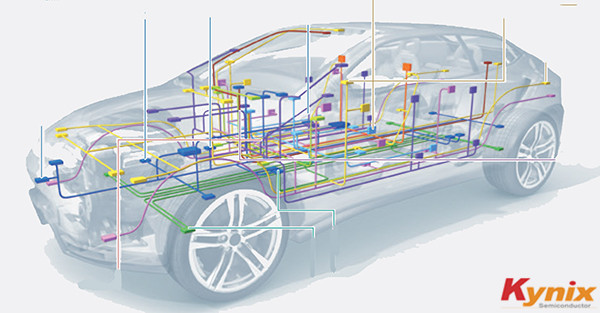
�����D1��܇�v�W(w��ng)�j(lu��)(�����_�ṩ)��
�������ػ��B�W(w��ng)�j(lu��)(LIN)��һ�N�͔�(sh��)��(j��)�������ľW(w��ng)�j(lu��)���������T���h(yu��n)�̟o耳��M(j��n)�롢�����������R���T֮Ė|����ͨ�^LIN�W(w��ng)�j(lu��)����(d��ng)��܇�_ʼ�Ƅ�(d��ng)�r(sh��)��܇�T��(hu��)�Ԅ�(d��ng)�i��;��(d��ng)��ȫ����ϵ�ϕr(sh��)������(b��o)���l(f��)��������(d��ng)������?x��)r���I�����P(gu��n)�];���ҕ�R����λ�Ԅ�(d��ng)�����{(di��o)������ǰ���O(sh��)�ã��@ȡ�Q���l���{���܇��
�����cLIN��ȣ�F(xi��n)lexRay����һ����(y��ng)�õ�һ�N���ٿɿ��ąf(xi��)�h���羀���(q��)��(d��ng)��FLASRIXϵ�y(t��ng)�ڽӽ�����(b��o)�r(sh��)�ṩ���ߵĜ�(zh��n)�_���������˿��]���ٶȽǵ�����������(d��ng)�{���Ƅ�(d��ng)��܇�Ա���������ײ����(d��ng)�x܇܇�_ʼ��һ�l����Ľֵ��ϻ���(d��ng)�ͻ���(d��ng)�r(sh��)���@����������
��������ý�w��ϵ�y(t��ng)��ݔ(����(sh��))�W(w��ng)�j(lu��)̎��܇�d��ý�w����܇�v��(n��i)·�ɸ��|(zh��)����ҕ�l�����l�͔�(sh��)��(j��)������ؓ(f��)؟(z��)�����Ԓ������܇���ϵ�y(t��ng)�ϲ����֙C(j��)������
������̫�W(w��ng)��̫�ý��������β�ʹ���M(j��n)����܇����������ͨ���ṩ�ĹǸ�݆ԃECU�ڰl(f��)��(d��ng)�C(j��)���ױP�����wϵ�y(t��ng)�Ĺ��ϡ���̫�W(w��ng)���lҕ�l���(AVB)�c�����(sh��)��������˿��ṩ�߱��攵(sh��)�����l��
�����ķN��Ƭ�C(j��)?
�������x���m����܇��(y��ng)�õ�MCU֮�g���g�[�����Ĕ�(sh��)��(j��)��������(hu��)��ʾ�������m����Щ��(y��ng)�á�һ��(g��)�����(g��)CAN�˿��dz�Ҋ�ģ�����̫�W(w��ng)�˿�;�mȻEthernet
AVB(IEEE
802.1Q)���y�õ���FlexRay�ʹ����(sh��)�W(w��ng)�j(lu��)Ҫ��MCU�܉�̎�����ٷֽM̎��;LIN����������һ�N�f(xi��)�hͨ����ֱ��֧�֣���ֻҪӲ������������@����(y��ng)ԓ���F(xi��n)���}��
�������_V850ES/JG-3H�Ǟ錍(sh��)�r(sh��)���Ƒ�(y��ng)���_�l(f��)�ĵ���48 MHz 32λRISC MCU��ԭNEC
V850��܇��(y��ng)�Úvʷ�ƾã����_��܇�M(j��n)һ������������V850ES����O(sh��)�����DMA��LVD��PWM��WDT��A/D�D(zhu��n)�Q����D/A�D(zhu��n)�Q����DMA��CAN��USB��������V850ES
CPUʹ��һ��(g��)�弉(j��)��ˮ����(zh��)�Ў����е�ָ������ַӋ(j��)�������g(sh��)�\(y��n)����߉�\(y��n)��͔�(sh��)��(j��)��ݔ������܇��(y��ng)���У�V850ES�l(f��)��(d��ng)�C(j��)���ƺͷ������Ƅ�(d��ng)ϵ�y(t��ng)��Ŀ��(bi��o)��
�����w˼��������܇��(d��ng)������(d��ng)ϵ���ױP�����M(j��n)���{�T�o����܇�����x���M����Ϣ�ʘ���(y��ng)���ṩ�ˏV����MCU���w˼����QRIVVA MPC55
54(�D2)��һ��(g��)132 MHz
32λMCU�����ڄ�(d��ng)��ϵ�y(t��ng)��(y��ng)�ã��������c(di��n)ȼ�χ��������늿�׃������ֱ��ȼ�χ���(ȼ?x��)�Ͳ��?�����˱������I/Oͨ��֮����оƬ߀��������(g��)CANģ�K��ÿ��(g��)ģ�K����64��(g��)���_��������܇��(y��ng)���I(l��ng)��������I(y��)���ơ��߶�늙C(j��)��������������O(sh��)���܊�ò�����
�����w˼����MPC 5554�D��
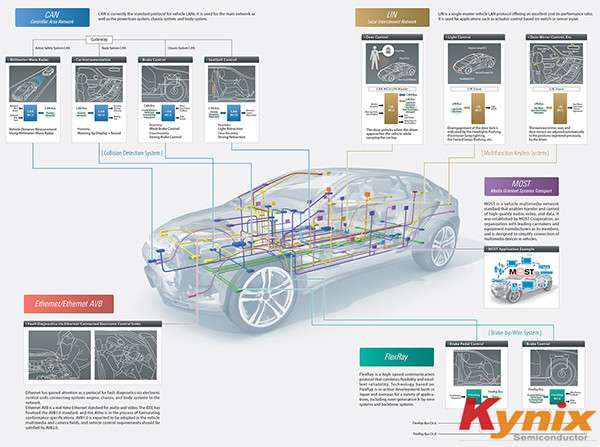
�����D2���w˼����MPC 5554���ڄ�(d��ng)������(d��ng)ϵ��(y��ng)��(�w˼����)��
����оƬMCP2561��MCP2021A�քe��CAN��LIN�հl(f��)����MCP2661��һ�N����CAN�հl(f��)��������CAN�f(xi��)�h�������������p��CAN����֮�g�Ľӿ���ԓ�b�ÝM�����(���_(d��)1
Mb/s)�����o�B(t��i)���(���͵�5��A)��늴ż�����(EMC)���o늷��(ESD)����܇Ҫ��
����MCP2021A�ǎ�늉��{(di��o)��(ji��)����LIN�հl(f��)����MCP2021A/2A�ṩ��һ�N�p����p��ͨ�������ӿڣ��ԝM��LIN����Ҏ(gu��)����ӆ��2.1��SAE
J2602-2��ԓ�b�ò���5 V��3.3 V 70������(w��n)���Դݔ��늉��{(di��o)��(ji��)����
����ATMEL AT90CAN32�ǻ���AVR RISC�ܘ�(g��u)��16 MHz 8λMCU��ԓоƬ�Y(ji��)����32 KB���W����2K��8��RAM��һ��(g��)8ͨ��/
10λA/D�D(zhu��n)�Q����һ��(g��)�����ֹ�(ji��)�ăɾ����нӿ����Լ�ISO 16484�J(r��n)�CCAN��������ͨ�^��һ��(g��)�r(sh��)������Ј�(zh��)�д����(sh��)ָ����ԓ�b�Ì�(sh��)�F(xi��n)�ӽ�ÿMHz 1
MIPS����������ƽ��ĺ�̎���ٶ���AT90CAN32������܇��ISO-TS16949�ȼ�(j��)1��Ҫ�����Ǻϸ��AEC-Q100��
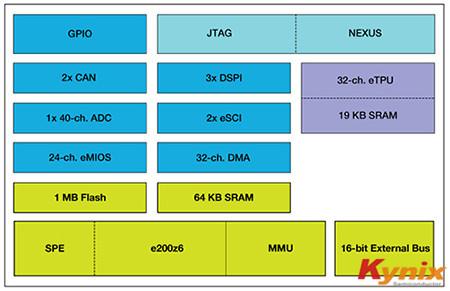
�����ⷨ�댧(d��o)�wSPC564 A80L7CFAR�Ǟ���܇��(d��ng)������(d��ng)ϵ��(y��ng)�ö��O(sh��)Ӌ(j��)��150 MHz
32λ��������ԓоƬ�ij���(bi��o)��SIMD�ܘ�(g��u)��DSP���c(di��n)ָ���֧��ʹ�ø��ٔ�(sh��)��(j��)̎�����������ɞ�����������ŵ���������(g��)ESCI;����(g��)DSPI;����(g��)FLASCAN��ÿ��(g��)64��(g��)��Ϣ;һ��(g��)FRISKģ�K������10��(g��)Mbps�������p��ͨ����128��(g��)ECC����Ϣ��(du��)��
����Silicon Labs C8051 F530A�Ǟ�LIN�W(w��ng)�j(lu��)�O(sh��)Ӌ(j��)��25��C8051 MCU��������һ��(g��)�ɾ��̵�12λ200 kSPS
ADC;�ɾ��̵�16λӋ(j��)��(sh��)��/���r(sh��)�����;�Լ�Ӳ��SPI��UART���ж˿���C8051
F530A�Ĝضȷ�����-40��+125��C����AEC-Q100�ϸ����
�����¿��_˹�x��TMS570LS31370�Ǟ鰲ȫ�P(gu��n)�I��(y��ng)�ö��O(sh��)Ӌ(j��)�ĸ�������܇��(j��)MCU������180��ARM CORTEX-R4F 32λRISC
CPUʹ�ð˼�(j��)��ˮ����(sh��)�F(xi��n)1.66
dMIPS/MHz���e�nj�(du��)��܇�O(sh��)Ӌ(j��)�߁��f��ԓоƬ��������(g��)CAN������(64��(g��)�]��);һ��(g��)���Ѓɂ�(g��)ͨ���͌��Â�ݔ��Ԫ��FlurRix������;һ��(g��)LIN�ӿڿ�����;һ��(g��)10/100
Mbps��̫�W(w��ng)MAC;����SCI��Ii
C��SPI(2)������(g��)�ྏ�_�������O(sh��)I����(n��i)����(MiBSPI)��Ŀ��(bi��o)��܇��(y��ng)�ð����Ƅ�(d��ng)ϵ�y(t��ng)����(d��ng)���D(zhu��n)��������(d��ng)�{�T�o����HEV/EV��׃����늳ع���ϵ�y(t��ng)��
�������Y(ji��)
�����mȻ��܇�댧(d��o)�w�Ј��Ǿ�ĺͿ������L���@��һ��(g��)�ϸ��MCU���@��(g��)���̵ĭh(hu��n)�����\(y��n)����һ��(g��)��������(zh��n)�Ե��^�̣���(y��n)���Ҫ��ȡ�Q�ڑ�(y��ng)�ó���?q��)��Ƕ�ô���P(gu��n)�I����ע������ڿ��]��MCU����܇�ϸ�����������Ƿ�ֱ��֧���������B�ӵľW(w��ng)�j(lu��)������]�У�Ո(q��ng)�_�������������ٶȡ�ͨ��������I/OS��̎�������뵽�đ�(y��ng)�ó���
�����O(sh��)Ӌ(j��)����������������(zh��n)�Եĭh(hu��n)�����O(sh��)����O(sh��)Ӌ(j��)�ߌ��ܺõؿ��]ʹ��MCU���@ЩMCU�ѽ�(j��ng)�M������܇��(y��ng)�õ��͵Đ��ӭh(hu��n)���l����




