|
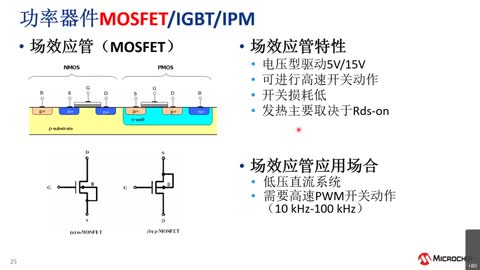
摘要:針對(duì)末端效應(yīng)器是一個(gè)典型的非線性系統(tǒng),且在微重力、環(huán)境溫度變化劇烈的太空中,機(jī)械機(jī)構(gòu)的參數(shù)隨著負(fù)載狀態(tài)和環(huán)境變化而變化,很難得到一個(gè)準(zhǔn)確的動(dòng)力學(xué)模型。因此文中研究的主要內(nèi)容是在空間環(huán)境中,如何實(shí)現(xiàn)末端效應(yīng)器穩(wěn)定可靠的控制,完成捕獲、拉緊及鎖合任務(wù)。 本文設(shè)計(jì)了高可靠性的獨(dú)立控制系統(tǒng),并且從軟硬件的角度采提高系統(tǒng)的可靠性;在高可靠性獨(dú)立控制系統(tǒng)的基礎(chǔ)上,通過采用合理的容錯(cuò)控制策略來提高末端效應(yīng)器的可靠性和延長使用壽命。 隨著我國的空間站建設(shè)已經(jīng)提上日程,空間站建設(shè)是一個(gè)復(fù)雜的大系統(tǒng)工程,在建設(shè)過程中要求有搬運(yùn)能力強(qiáng)的空間大機(jī)械臂,實(shí)現(xiàn)目標(biāo)飛行器和機(jī)械臂之間的數(shù)據(jù)傳輸,并能夠提供航天員出艙活動(dòng)的平臺(tái)。針對(duì)上述要求末端效應(yīng)器無疑是最合適的方案。 鎖合末端效應(yīng)器(簡稱末端效應(yīng)器)是大型空間站機(jī)械臂的一部分,包括捕獲機(jī)構(gòu)、拉緊機(jī)構(gòu)和鎖合機(jī)構(gòu),主要完成對(duì)目標(biāo)飛行器的捕獲、抓取及釋放等任務(wù)。末端效應(yīng)器具有結(jié)構(gòu)簡單、兼容性好、在軌壽命長、可靠性高和相互性好等優(yōu)點(diǎn)。 為了實(shí)現(xiàn)高可靠性末端效應(yīng)器控制系統(tǒng),提出并設(shè)計(jì)了高可靠性獨(dú)立控制系統(tǒng),并且通過從軟硬件的角度提高系統(tǒng)的可靠性;在高可靠性獨(dú)立控制系統(tǒng)的基礎(chǔ)上,設(shè)計(jì)了合理的容錯(cuò)控制策略。該系統(tǒng)能夠完成對(duì)其準(zhǔn)確測(cè)試。 1 高可靠性獨(dú)立控制系統(tǒng) 末端效應(yīng)器機(jī)械機(jī)構(gòu)的運(yùn)動(dòng)可以看作是一個(gè)點(diǎn)到點(diǎn)的運(yùn)動(dòng),首先需要考慮在兩個(gè)位置之間的運(yùn)動(dòng)軌跡,也就是運(yùn)動(dòng)規(guī)劃問題,然后根據(jù)規(guī)劃的運(yùn)動(dòng)要求進(jìn)行執(zhí)行器的控制,因此末端效應(yīng)器的運(yùn)動(dòng)控制系統(tǒng)包括任務(wù)的運(yùn)動(dòng)規(guī)劃和驅(qū)動(dòng)機(jī)構(gòu)的執(zhí)行級(jí)控制。 1.1 運(yùn)動(dòng)規(guī)劃 對(duì)于末端效應(yīng)器的運(yùn)動(dòng)控制規(guī)劃較為簡單而且固定。為保證長期穩(wěn)定可靠的工作,需要減少摩擦損耗,因此要保證運(yùn)動(dòng)應(yīng)盡可能的平滑,也就是要求加速度要小并且變化平緩,速度變化也要平緩。在該要求下,最終的速度軌跡可以采用梯形、正弦形等形式,通過采樣得到一組合適的軌跡點(diǎn)輸入到控制輸入端即可。一般情況下,速度控制的主要功能是通過有目的地限制加速度來減少軌跡誤差。為避免驅(qū)動(dòng)軸產(chǎn)生沖擊、失步、超程和振蕩,保證運(yùn)動(dòng)部件的平穩(wěn)和準(zhǔn)確定位,在啟停階段或各程序轉(zhuǎn)接時(shí),要進(jìn)行加減速控制,以使進(jìn)給速度平滑過渡。 目前運(yùn)動(dòng)控制系統(tǒng)中常用的加減速規(guī)律包括很多,常見的加減速控制算法有直線、三角函數(shù)、指數(shù)、拋物線、S曲線加減速等算法。在本系統(tǒng)中采用了三角函數(shù)加減速規(guī)律,如圖1所示。由于三角函數(shù)的計(jì)算復(fù)雜,不能滿足數(shù)控系統(tǒng)實(shí)時(shí)性要求。可以事先對(duì)其進(jìn)行處理,將其做成查找表的形式存放于內(nèi)存中。 由于三角函數(shù)加減速規(guī)律可以實(shí)現(xiàn)平滑運(yùn)動(dòng),采用這種運(yùn)動(dòng)軌跡,使得控制更加容易,并且潛在里也會(huì)提高系統(tǒng)的控制精度,延長系統(tǒng)壽命。三角函數(shù)的最大加速度、速度等參數(shù)要結(jié)合電機(jī)的參數(shù)和負(fù)載情況進(jìn)行選擇。 1.2 驅(qū)動(dòng)機(jī)構(gòu)的執(zhí)行級(jí)控制設(shè)計(jì) 在確定了控制系統(tǒng)期望輸入以后,關(guān)鍵是驅(qū)動(dòng)機(jī)構(gòu)的執(zhí)行級(jí)控制問題,也就是無刷直流電機(jī)的控制問題。由于無刷直流電動(dòng)機(jī)通過利用電子換向器取代了機(jī)械電刷和機(jī)械換向器,保留了直流電動(dòng)機(jī)的優(yōu)點(diǎn),同時(shí)又具有交流電動(dòng)機(jī)的結(jié)構(gòu)簡單、運(yùn)行可靠、維護(hù)方便等優(yōu)點(diǎn),并且特別適合空間環(huán)境,因此我們這里主要考慮執(zhí)行單元無刷直流電動(dòng)機(jī)的控制問題。 由于運(yùn)動(dòng)主要依靠機(jī)械機(jī)構(gòu)傳動(dòng),因此末端效應(yīng)器控制系統(tǒng)性能要求主要考慮抵達(dá)位置的高精度。高精度主要指的是控制系統(tǒng)的穩(wěn)態(tài)特性,也就是說要求系統(tǒng)的穩(wěn)態(tài)誤差要小,而對(duì)動(dòng)態(tài)特性要求不高。 1.2.1 控制方案 由直流電機(jī)運(yùn)動(dòng)方程可知,在忽略摩擦阻尼的情況下,加速度與電動(dòng)機(jī)的轉(zhuǎn)矩成正比,而且轉(zhuǎn)矩又與電機(jī)的電流成正比,因此,要實(shí)現(xiàn)電機(jī)的高精度高動(dòng)態(tài)性能控制,就需要同時(shí)對(duì)電機(jī)的速度、電流及位置進(jìn)行檢測(cè)和控制。因此,本控制系統(tǒng)通過三閉環(huán)結(jié)構(gòu)實(shí)現(xiàn)電機(jī)的運(yùn)動(dòng)控制,如圖2所示。 當(dāng)電機(jī)處于運(yùn)行狀態(tài)時(shí),給定的位置信號(hào)Ua與反饋位置信號(hào)Ub的偏差經(jīng)過(位置環(huán))PID調(diào)節(jié)得到速度的參考值Vg;控制器根據(jù)測(cè)出的反饋位置信息計(jì)算出當(dāng)前轉(zhuǎn)速,Vg與當(dāng)前轉(zhuǎn)速的偏差進(jìn)行PI調(diào)節(jié)(速度環(huán))得到電流的給定電壓參考值Uig;電機(jī)繞組電流反饋信號(hào)經(jīng)過電流傳感器的檢測(cè)得到當(dāng)前主回路的電流反饋電壓值Uif,將Uif與Uig進(jìn)行PI計(jì)算,得到的電流調(diào)節(jié)器的輸出去調(diào)節(jié)占空比,進(jìn)而控制功率開關(guān)管的導(dǎo)通與關(guān)斷,從而實(shí)現(xiàn)對(duì)無刷直流電動(dòng)機(jī)位置、轉(zhuǎn)速、電流或轉(zhuǎn)矩的控制。 在三閉環(huán)控制系統(tǒng)中,電流環(huán)和速度環(huán)均為內(nèi)環(huán),位置環(huán)為外環(huán)。電流環(huán)的作用是提高系統(tǒng)的快速性,抑制電流環(huán)內(nèi)部干擾,限制最大電流保障系統(tǒng)安全運(yùn)行,電流環(huán)采用PI調(diào)節(jié)器。速度環(huán)的作用是增加系統(tǒng)抗負(fù)載擾動(dòng)的能力,抑制速度波動(dòng),速度環(huán)采用PI調(diào)節(jié)器。位置環(huán)的作用是保證系統(tǒng)靜態(tài)精度和動(dòng)態(tài)跟蹤的性能,位置環(huán)采用PID控制。 因?yàn)槟┒诵?yīng)器的控制主要考慮位置精度,而對(duì)動(dòng)態(tài)特性要求不高,因此本系統(tǒng)中采用了包含位置環(huán)在內(nèi)的三閉環(huán)的控制方式。 1.2.2 中心控制器硬件實(shí)現(xiàn)方案 本系統(tǒng)的中心控制器采用的是DSP TMS320F2812芯片,此芯片內(nèi)集成了A/D、PWM控制器、CAN控制器等功能模塊,使得電機(jī)的控制相對(duì)簡單。另外,采用高性能DSP為控制核心的電機(jī)系統(tǒng)具有性能優(yōu)越、高可靠性、快速響應(yīng)、體積小、重量輕等特點(diǎn)。在系統(tǒng)中設(shè)置了速度調(diào)節(jié)器和電流調(diào)節(jié)器,分別調(diào)節(jié)電機(jī)的轉(zhuǎn)速和電流,兩者之間實(shí)行串級(jí)連接,把速度調(diào)節(jié)器的輸出當(dāng)作電流調(diào)節(jié)器的輸入,再用電流調(diào)節(jié)器的輸出去控制PWM裝置。如圖3即為基于DSP芯片TMS320F2812的實(shí)現(xiàn)框圖。 1.2.3 控制系統(tǒng)硬件各個(gè)模塊的實(shí)現(xiàn)方案 1)PWM控制電路實(shí)現(xiàn) 本系統(tǒng)的電機(jī)調(diào)速主要考慮采用PWM(脈寬調(diào)制)調(diào)速。調(diào)壓調(diào)速是無刷直流電機(jī)目前最常用的一種調(diào)速方式,主要是通過改變加在電機(jī)電樞繞組兩端的電壓來改變電機(jī)的轉(zhuǎn)速,這種方法通常將電機(jī)的電壓由額定電壓向下調(diào)節(jié)電樞電壓,達(dá)到使電機(jī)轉(zhuǎn)速由額定轉(zhuǎn)速變?yōu)橄蛳抡{(diào)速,這種調(diào)速方法調(diào)節(jié)的過程中損耗的能量小,且轉(zhuǎn)速過程中系統(tǒng)波動(dòng)比較小,靜態(tài)的穩(wěn)定性較高,響應(yīng)速度快。是當(dāng)前無刷直流電機(jī)應(yīng)用最常見的、運(yùn)行最穩(wěn)定、最有效的調(diào)速方式,它通常有PWM調(diào)節(jié)方式、旋轉(zhuǎn)變流機(jī)構(gòu)調(diào)節(jié)方式以及靜止變流機(jī)構(gòu)調(diào)節(jié)方式。目前無刷直流電機(jī)無級(jí)調(diào)速系統(tǒng)也大多都采用調(diào)壓調(diào)速中的PWM調(diào)節(jié)方式。 PWM調(diào)節(jié)方式是一種根據(jù)能量轉(zhuǎn)換等效原理,是由將固定不變的系統(tǒng)電壓斬截成占空比可變的PWM波,經(jīng)過改變占空比來實(shí)現(xiàn)電機(jī)電樞兩端平均電壓的電壓調(diào)節(jié)方式,這種調(diào)節(jié)方式的特點(diǎn)具有體積小、凋速性能好、成本低、控制方便等優(yōu)點(diǎn),與此同時(shí),它也比較容易與控制器之間構(gòu)成閉環(huán)控制系統(tǒng),控制方法也顯得靈活多變。因此,我們采用PWM調(diào)壓調(diào)節(jié)方式。在本系統(tǒng)中PWM脈沖波的產(chǎn)生是直接通過DSP的PWM口得到。 2)驅(qū)動(dòng)電路設(shè)計(jì) 對(duì)于末端效應(yīng)器系統(tǒng),驅(qū)動(dòng)電路部分采用專門的集成的驅(qū)動(dòng)模塊結(jié)合MOSFET實(shí)現(xiàn)。為了避免和DSP之間產(chǎn)生干擾,增強(qiáng)可靠性,采用光電隔離模塊和集成驅(qū)動(dòng)模塊共同構(gòu)成驅(qū)動(dòng)電路來驅(qū)動(dòng)功率MOSFET管。如圖4所示,由光電隔離模塊和IR2112模塊組成的驅(qū)動(dòng)A相橋臂的連接方式。光耦部分起到隔離和電平轉(zhuǎn)換的作用。驅(qū)動(dòng)三相全橋電路需要6路PWM信號(hào),而IR2112只能同時(shí)輸出2路PWM信號(hào),所以驅(qū)動(dòng)電路共需要3片IR2112芯片。 3)電流檢測(cè)和速度檢測(cè)電路 電流檢測(cè)電路就是將電機(jī)的三相電流進(jìn)行數(shù)模轉(zhuǎn)換器采集,然后反饋到主控制器,與控制芯片內(nèi)的速度控制器產(chǎn)生的電信號(hào)做比較,完成對(duì)電機(jī)的電流閉環(huán)控制。本控制系統(tǒng)中實(shí)際的電流比較小,功率也比較小,因此采用了一個(gè)旁路電阻來檢測(cè)實(shí)際電機(jī)的相電流的大小,電阻位于三相功率變換全控的電路的橋臂和地線之間。 速度檢測(cè)電路是控制系統(tǒng)中最重要的環(huán)節(jié)。速度檢測(cè)電路檢測(cè)電機(jī)的實(shí)際轉(zhuǎn)速并且將檢測(cè)的實(shí)際速度信號(hào)轉(zhuǎn)化為電信號(hào)直接傳送到控制芯片的引腳,然后在主控制器內(nèi)完成對(duì)轉(zhuǎn)速的計(jì)算并且和電機(jī)的預(yù)定轉(zhuǎn)速作比較完成回路系統(tǒng)。 本系統(tǒng)利用控制器的計(jì)算處理能力,采用霍爾位置傳感器的信號(hào)來計(jì)算無刷直流電機(jī)的轉(zhuǎn)速。 2 末端效應(yīng)器控制器可靠性及長壽命設(shè)計(jì) 在第一章節(jié)中末端效應(yīng)器的詳細(xì)設(shè)計(jì)中控制器的設(shè)計(jì)包括任務(wù)級(jí)執(zhí)行級(jí)控制方案、具體軟硬件實(shí)現(xiàn)中元器件選擇及實(shí)現(xiàn)方案等都是以高可靠性為中心進(jìn)行分析和設(shè)計(jì)的。下面主要從軟硬件的角度考慮故障的處理方法,還有容錯(cuò)控制策略的設(shè)計(jì)。 2.1 軟硬件可靠性保證 2.1.1 硬件可靠性保證 解決可靠性問題最主要的方法是執(zhí)行器故障診斷和處理。常見電機(jī)故障有: 1)電機(jī)過載、過流。由于系統(tǒng)的電流比較小,故可以采用主回路串聯(lián)采樣電阻的方法進(jìn)行過流檢測(cè)。定子電流經(jīng)過電阻之后轉(zhuǎn)變成電壓信號(hào),在此串入小電阻,小電阻兩端的電壓經(jīng)過放大隔離后送入A/D單元,通過主控制器的軟件編程或邏輯實(shí)現(xiàn)對(duì)電機(jī)的過載保護(hù)。 2)電機(jī)過速。 3)驅(qū)動(dòng)器非正常復(fù)位。本系統(tǒng)采用了硬件冗余,設(shè)計(jì)了急停電路,使系統(tǒng)停止運(yùn)行。 另外光電編碼器等傳感部件也可能發(fā)生故障。在系統(tǒng)運(yùn)行時(shí)可能出現(xiàn)的故障有: 1)數(shù)據(jù)傳輸錯(cuò)誤。診斷辦法是采用奇偶校驗(yàn)法判別,然后用線性外推法給出當(dāng)前傳感器數(shù)據(jù); 2)數(shù)據(jù)采集錯(cuò)誤。這種故障可能造成控制力矩的波動(dòng),診斷采用野點(diǎn)剔除的辦法加以剔除,然后用線性外推法給出當(dāng)前傳感器數(shù)據(jù)。 2.1.2 軟件可靠性保證 1)系統(tǒng)啟動(dòng)自檢。在啟動(dòng)系統(tǒng)時(shí),必須檢測(cè)元器件是否正常工作。 2)系統(tǒng)故障報(bào)警和處理。當(dāng)有故障發(fā)生時(shí),軟件能檢測(cè)出該故障,并診斷其故障類型,從而做出必要的處理。 3)事故急停處理。當(dāng)一旦有事故發(fā)生時(shí),系統(tǒng)應(yīng)該立即關(guān)閉,力求將事故對(duì)系統(tǒng)的破壞降低到最低程度。 2.2 高可靠性獨(dú)立控制系統(tǒng)的合理容錯(cuò)控制策略設(shè)計(jì) 空間站遠(yuǎn)程遙操作機(jī)械臂SSRMS(Space Station Remote Manipulator System)、歐洲遙操作機(jī)械臂ERA(European Robotic Arm)、日本實(shí)驗(yàn)艙遙操作機(jī)械臂JEMRMS(Japanese Experimental Module Remote Manipulator System)在設(shè)計(jì)和運(yùn)行過程中都要求機(jī)械臂系統(tǒng)至少能夠容忍兩次故障的發(fā)生。這對(duì)末端效應(yīng)器控制系統(tǒng)也提出了一個(gè)新的要求。控制系統(tǒng)的容錯(cuò)設(shè)計(jì)及故障檢測(cè)與診斷是提高航天器的可靠性的有效途徑。 末端效應(yīng)器控制系統(tǒng)除了提高單一控制系統(tǒng)的高可靠性之外,考慮采用控制系統(tǒng)的容錯(cuò)也是提高可靠性的一個(gè)合理的選擇。同時(shí)對(duì)于一個(gè)精密的運(yùn)動(dòng)控制系統(tǒng)來說,系統(tǒng)的容錯(cuò)性是調(diào)試和運(yùn)行時(shí)需要考慮的功能完整性問題。對(duì)于控制系統(tǒng)的容錯(cuò)設(shè)計(jì)主要考慮以下兩方面的要素: 1)需要結(jié)合具體的任務(wù),選擇合適的傳感器、執(zhí)行器和控制器備份策略: 2)需要考慮與之相配合的故障診斷和診斷方法。 對(duì)于傳感器、執(zhí)行器和控制器備份方案,本系統(tǒng)了采用類似于ERA的關(guān)節(jié)控制系統(tǒng),即采用雙繞組永磁同步電機(jī)構(gòu)建相互獨(dú)立的2套驅(qū)動(dòng)子系統(tǒng),但是由于2套驅(qū)動(dòng)系統(tǒng)工作在冷備份模式,容錯(cuò)能力不高,且沒有充分利用冗余備份的傳感器資源,所以為了提高容錯(cuò)能力,本系統(tǒng)選擇了雙繞組余度電機(jī)工作在熱備份模式。 由于末端效應(yīng)器機(jī)械機(jī)構(gòu)具有模型非線性、摩擦非線性和負(fù)載變動(dòng)的自適應(yīng)等因素,本系統(tǒng)的故障檢測(cè)和故障診斷主要是基于傳感器冗余信息的故障檢測(cè)方法,主要通過位置傳感器、力傳感器的信號(hào)來推斷系統(tǒng)的狀態(tài),進(jìn)而進(jìn)行故障檢測(cè)。位置信息的配置主要包括電機(jī)數(shù)字霍爾傳感器、電機(jī)旋轉(zhuǎn)變壓器等多級(jí)容錯(cuò)備份和故障檢測(cè)。力傳感器的故障通過計(jì)算電機(jī)位置信息和參考力進(jìn)行比較來判斷。 結(jié)合實(shí)際情況,本控制系統(tǒng)的電機(jī)驅(qū)動(dòng)控制部分容錯(cuò)設(shè)計(jì)主要采用了雙繞組余度電機(jī)工作在熱備份模式。相應(yīng)的故障檢測(cè)方法為基于傳感器冗余信息的故障檢測(cè)方法。具體的冗余切換邏輯結(jié)構(gòu)如圖5所示。 3 結(jié)論 末端效應(yīng)器機(jī)械機(jī)構(gòu)在空間環(huán)境中穩(wěn)定可靠性的工作,作為其核心的電機(jī)控制系統(tǒng)的長期穩(wěn)定可靠的工作就顯得尤為重要。因此文中首先考慮完成任務(wù)的運(yùn)動(dòng)規(guī)劃問題,然后考慮了控制系統(tǒng)方式及其軟硬件實(shí)現(xiàn)的具體要求。來實(shí)現(xiàn)高可靠性獨(dú)立控制系統(tǒng)的設(shè)計(jì)。并且在高可靠性獨(dú)立控制系統(tǒng)的基礎(chǔ)上,還設(shè)計(jì)了合理的容錯(cuò)控制策略。此系統(tǒng)經(jīng)過實(shí)驗(yàn),達(dá)到了設(shè)計(jì)要求。 |