|
����: Ning Dai��Raphael Horton ����ź�Ӌ(j��)��C(j��)�ИI(y��)���Ƅ�(d��ng)�£���̫�W(w��ng)ϵ�y(t��ng)�������Ӳ���ܶȣ������_(d��)����100Gbps��ϵ�y(t��ng)�еČ��������· (ASIC)��̎�����t�Ը��ߵ��l�ʺ��͵�늉��\(y��n)�С������c��̫�W(w��ng)���g(sh��)����ͬ�����_�P(gu��n)�Դ��������o�B(t��i)ģʽ���ṩ�߾����O(sh��)���c(di��n)���ͼy��������,ͬ�r(sh��)���ڄ�(d��ng)�B(t��i)ģʽ���M(j��n)�п���˲�B(t��i)푑�(y��ng)���@���^����Ҫ�����d���c(di��n) (POL) �Ќ�(sh��)ʩ�Ŀ��Ʒ������H�܉��ṩ�������ܣ�߀Ҫ���ھ��ИO�͵ĵ�Ч��(li��n)���(ESR)ݔ��������^��ݔ��ݔ��늉��ȵĭh(hu��n)�������������������Hyper Speed Control�������ٿ��ƣ��ܘ�(g��u)�ɞ�̎������ASIC�ṩ��ѵ�POL��Q�����������U���˂��y(t��ng)�}���{(di��o)��(PWM)�����cHyper Speed Control�Ĺ���ԭ������(du��)�����@�ɷN���Ʒ�����˲�B(t��i)푑�(y��ng)���ܡ������߀�ṩ��һ�(xi��ng)��(sh��)�(y��n)�Y(ji��)���Խ�������IJ�֮ͬ̎�� ����ԭ�� ����Hyper Speed Control�Ī�(d��)�ؼܘ�(g��u)���H�Ɍ�(sh��)�F(xi��n)������˲�B(t��i)푑�(y��ng)��ͬ�r(sh��)߀�ܽ���ݔ����ݣ�ʹ��ݔ��Mݔ��늉���(Vin/Vout) �\(y��n)�гɞ���ܡ������U��ԓ���ƙC(j��)�ƣ��ؽ��ÈD1��ʾ�ĽY(ji��)��(g��u)�D���f������D1��ʾ��ݔ��늉���(j��ng)�։���R1��R2�։����ɷ������_FB�xȡ��ͨ�^������猧(d��o)�Ŵ������`�����^�����c��(n��i)������(zh��n)늉�VREF �M(j��n)�б��^���������늉��½��ҷŴ���ݔ��С�ڃ�(n��i)������(zh��n)늉����`����^�����|��(d��ng)����߉������һ��(g��)��(d��o)ͨ�r(sh��)�g���ڡ���(d��o)ͨ�r(sh��)�g�����L(zh��ng)���ɡ��̶�Ton��Ӌ(j��)���·�A(y��)�ȴ_���� 
���У�Vout�鹦�ʼ�(j��)ݔ��늉���Vin�鹦�ʼ�(j��)ݔ��늉���fsw���_�P(gu��n)�l�ʡ� �ڌ�(d��o)ͨ�r(sh��)�g���ڽY(ji��)�����O(sh��)���(hu��)�M(j��n)���P(gu��n)�����ڡ��˕r(sh��)����(n��i)���߉���(c��)�(q��)��(d��ng)�����P(gu��n)��߉���(c��)�����������댧(d��o)�w��(ch��ng)Ч��(y��ng)���w��(MOSFET)���͉���(c��)�(q��)��(d��ng)������(d��o)ͨ�͉���(c��)����������댧(d��o)�w��(ch��ng)Ч��(y��ng)���w��(MOSFET)���P(gu��n)���r(sh��)�g����ȡ�Q�ڷ���늉�VFB���������늉��Q�����P(gu��n)���r(sh��)�g����С�ڿ�������(n��i)���O(sh��)Ӌ(j��)�Q������С�P(gu��n)���r(sh��)�gTOFF(min)���t���ƭh(hu��n)·��ʹ��TOFF(min)���S����������е��������(q��)��(d��ng)�߉���(c��)����������댧(d��o)�w��(ch��ng)Ч��(y��ng)���w��(MOSFET)���ڷ���늉��IJ��ȅ^(q��)��������늉���������(zh��n)늉����£��P(gu��n)���r(sh��)�g�Kֹ����һ��(g��)��(d��o)ͨ�r(sh��)�g����ͨ�^�����·�_�����D2�@ʾ���D(zhu��n)�Q���ĵ��Ͳ��Ρ�
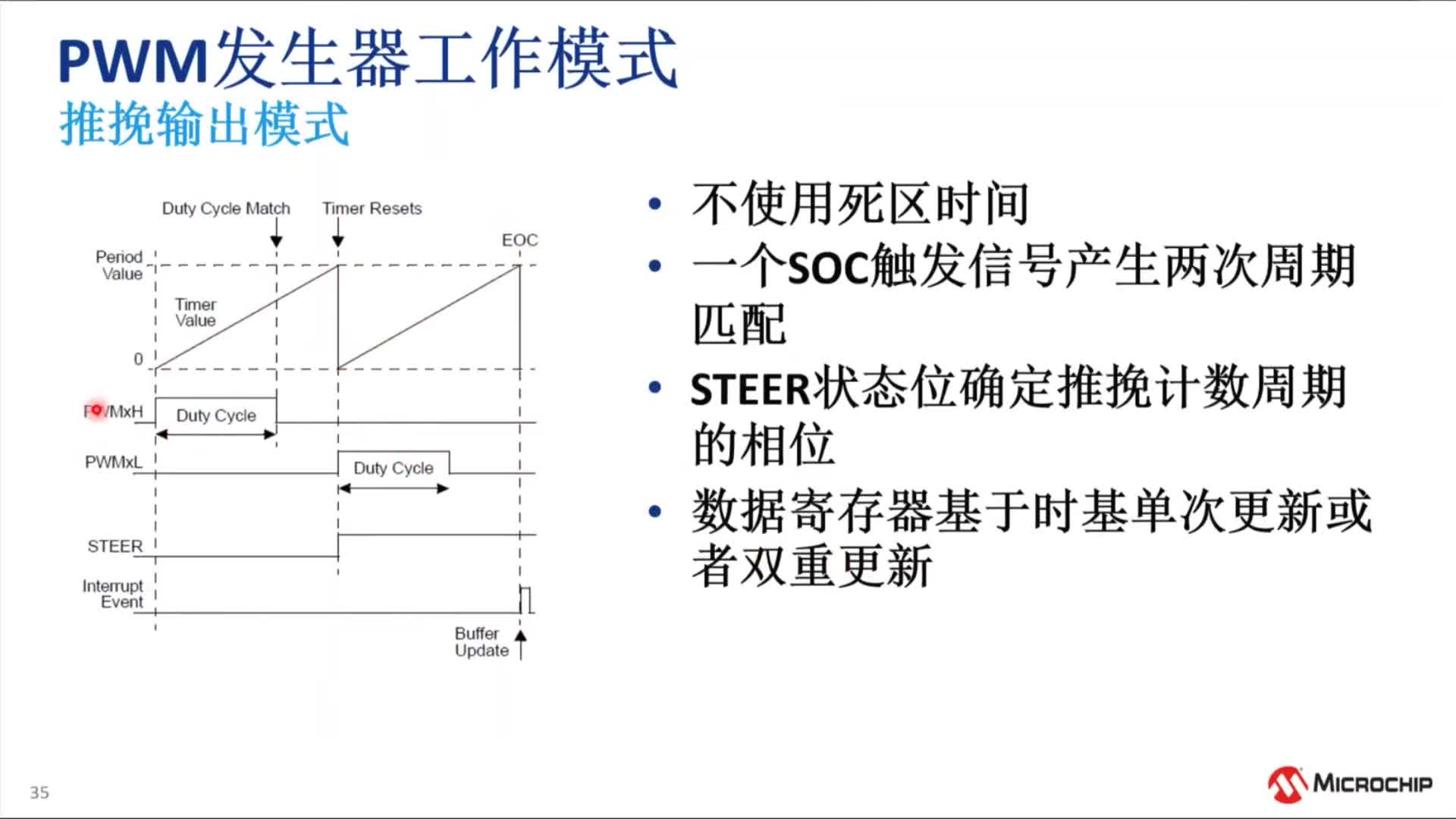
�D1:Hyper Speed Control�Y(ji��)��(g��u)�D
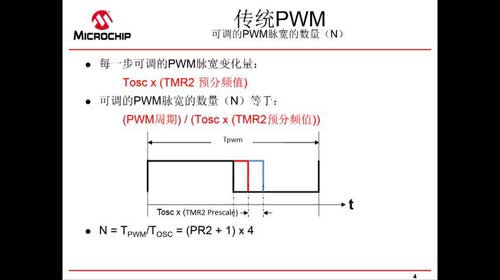
�D2:Hyper Speed Control���ƭh(hu��n)·���r(sh��)�������늉����ڻ���(zh��n)늉����t�|�l(f��)��(d��o)ͨ�r(sh��)�g�_ʼ�� ������֪���^����ռ�ձ��{(di��o)���D(zhu��n)�Q�����к㶨�_�P(gu��n)�l�ʣ�ԓ�l������ʎ�����ɡ������_�P(gu��n)��B(t��i)����(d��o)ͨ���P(gu��n)�ࣩ���_�P(gu��n)������̖(h��o)ͨ�^��(du��)�ȿ���늉�Vc�c�؏�(f��)����X�����ήa(ch��n)������D 3(a) ��ʾ������늉�ͨ��ͨ�^�Ŵ��`����cݔ��늉������ȵķ���늉��c������늉�ˮƽ������(zh��n)늉���֮�g�IJ�@�á���PWM�������еă�(n��i)����ʎ���a(ch��n)�����؏�(f��)��X���l�ʛQ�����_�P(gu��n)�l�ʡ���(d��ng)�Ŵ���`����̖(h��o)������X���Εr(sh��)���_�P(gu��n)������̖(h��o)׃�ߣ���(d��o)���_�P(gu��n)�_������t���_�P(gu��n)�ǔ��_�ġ��D(zhu��n)�Q����ռ�ձȿɱ�ʾ����
���У�D��PWM�D(zhu��n)�Q����ռ�ձȣ�����(d��o)ͨ���m(x��)�r(sh��)�g�c�_�P(gu��n)�r(sh��)�g����֮�ȣ��ǿ�׃����Ts��㶨���_�P(gu��n)���ڣ�Ton���_�P(gu��n)�Č�(d��o)ͨ�r(sh��)�g���D3�@ʾ��ռ�ձ��{(di��o)�ƿ��ƙC(j��)��(g��u)�c���ƭh(hu��n)·���r(sh��)�Ŀ���ԭ����
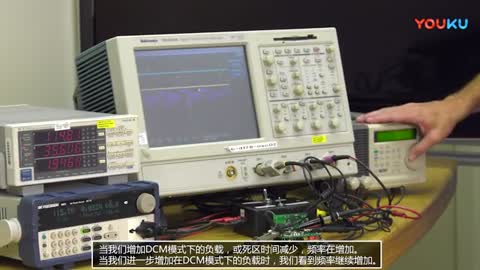
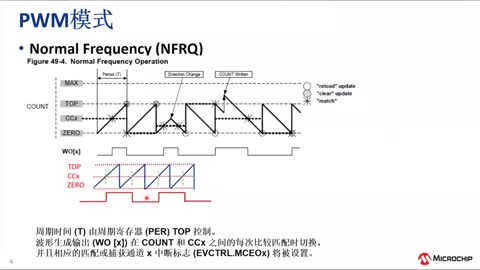
�D3��ռ�ձ��{(di��o)�ƿ��ƵĽY(ji��)��(g��u)�D�c���ƶ��r(sh��) ͨ�^�о��@�ɷN��ͬ�Ŀ��Ʒ������҂����Կ������������ڷ�(w��n)�B(t��i)��B(t��i)���Ժ㶨�l���\(y��n)�У�������ʹ�õČ�(d��o)ͨ���P(gu��n)���_�P(gu��n)�Ę�(bi��o)��(zh��n)��ͬ��Hyper Speed Control����?j��)?n��i)������(zh��n)늉��̓�(n��i)����(d��o)ͨ�r(sh��)�g��Ӌ(j��)�������_�P(gu��n)����ռ�ձ�PWM���Ƅt����?j��)?n��i)����ʎ���ͻ���(zh��n)�����_�P(gu��n)��ռ�ձȡ���ˣ�Hyper Speed Control�{����㶨�Č�(d��o)ͨ�r(sh��)�g���ƣ�������ݔ��늉��cݔ��늉�֮���^�ߵđ�(y��ng)�ã���PWM���ƾ�����͵�ռ�ձ����ƣ���ζ�����m��ݔ��늉��cݔ��늉�֮���^�ߵđ�(y��ng)�á� ˲�B(t��i)푑�(y��ng) ��ؓ(f��)�d˲׃�r(sh��)���@�ɷN���Ʒ����ı��F(xi��n)Ҳ��ͬ���D4�f���ˮ�(d��ng)ݔ�������0�����M�d�r(sh��)Hyper Speed Control��ռ�ձ��{(di��o)�ƿ��Ƶĵ��Ͳ��Ρ���(du��)��Hyper Speed Control���f����(d��ng)ؓ(f��)�d˲׃�r(sh��)��ݔ��늉��½�������늉�Ҳ�S֮�½��������ƭh(hu��n)·�ɜy(c��)������늉�С�ڃ�(n��i)������(zh��n)늉��r(sh��)���������������M(j��n)����С�P(gu��n)���r(sh��)�g����һ��(g��)�_�P(gu��n)�����У������̶ȵp��ݔ��늉��½������ڌ�(d��o)ͨ�r(sh��)�g�㶨��������ȵp���P(gu��n)���r(sh��)�g���@��ζ���D(zhu��n)�Q���܉������(d��o)ͨ�r(sh��)�g�ĸ��_�P(gu��n)�l�ʏ�ݔ�����ݔ�����D(zhu��n)����������(du��)��ռ�ձ��{(di��o)�ƿ��ƶ��ԣ���ؓ(f��)�d˲׃�r(sh��)��ݔ���ͷ���늉��½���Ȼ��������ռ�ձ�����ǰһ��(g��)�_�P(gu��n)���ڵ�늉��A(y��)�ȴ_����ռ�ձȵ���һ��(g��)�_�P(gu��n)���ڲŕ�(hu��)���ӣ�
�D4��Hyper Speed Control��PWM���Ƶ�˲�B(t��i)푑�(y��ng)���Ͳ���
�D5������Hyper Speed Control��ռ�ձ��{(di��o)�ƿ��Ƶ��D(zhu��n)�Q����˲�B(t��i)푑�(y��ng)�y(c��)���Y(ji��)�� �@��(hu��)��(d��o)��늉�����½����D5�@ʾ�˾��� Hyper Speed Control��ռ�ձ��{(di��o)�ƿ��Ƶ�ֱ��-ֱ���D(zhu��n)�Q����˲�B(t��i)푑�(y��ng)�y(c��)���Y(ji��)�����M���ɂ�(g��)ֱ��-ֱ���D(zhu��n)�Q����һ��(g��)ʹ�������ٿ�����MIC2164����һ��(g��)ʹ��ռ�ձ��{(di��o)��PWM���������ɂ�(g��)������2.2��H��ݔ���Б�(y��ng)������ͬ�ӵėl�����M(j��n)�Мy(c��)ԇ��12V��ݔ��늉���1.5V�� ݔ��늉���100��F��ݔ����ݡ�˲�r(sh��)ؓ(f��)�d�� 5A/��s���D(zhu��n)�Q���ʏ�0A�f����5A�����г����ٿ��������D(zhu��n)�Q���ĉ�����208mV�������Ђ��y(t��ng)ռ�ձ��{(di��o)�ƿ��������D(zhu��n)�Q���ĉ�����244mV����ǰ�߸�17% �����_(d��)���c���г����ٿ��������D(zhu��n)�Q��ͬ�ӵĉ���������ռ�ձ��{(di��o)�ƿ��������D(zhu��n)�Q�����������47��F��ݔ����ݡ� ���Y(ji��) �����U����Hyper Speed Control��ռ�ձ��{(di��o)�ƿ��ƵĹ���ԭ���͙C(j��)�ƣ�����(du��)����?c��)ڷ�(w��n)�B(t��i)�̈́�(d��ng)�B(t��i)�l���µ������M(j��n)���˱��^��Hyper Speed Control���пɌ�(sh��)�F(xi��n)����˲�B(t��i)푑�(y��ng)�ă�(y��u)��(sh��)���cռ�ձ��{(di��o)�ƿ����������ݔ������^�١������ⲿ�y��ע��W(w��ng)�j(lu��)����(du��)���κ���͵�ݔ��������܉��Cϵ�y(t��ng)�ķ�(w��n)������ռ�ձ��{(di��o)�ƿ��ƌ�(du��)ݔ����ݾ�����͵�ESRҪ���Ա��C����ƭh(hu��n)·�ķ�(w��n)���ԡ���ˣ����dz��m����ݔ��늉��cݔ��늉�֮���^��đ�(y��ng)�á� |